桥梁施工无人机巡检:在空中做工程监理
桥梁施工往往位于交通要道和复杂环境中,一边要抢进度、保通车、控成本,另一边又必须守住安全底线:临时结构是否可靠、脚手架与支撑是否规范、围挡和导改是否到位、材料堆放是否侵占通行空间、施工车辆调度是否造成新的风险。传统监理更多依赖现场抽查与固定监控,问题在于看得不全、看得不连续、说得不够客观——尤其当施工点位拉得很长、桥面桥下同时作业、工序频繁切换时,单靠“人走到哪看哪”,很难从整体视角把风险点抓出来。
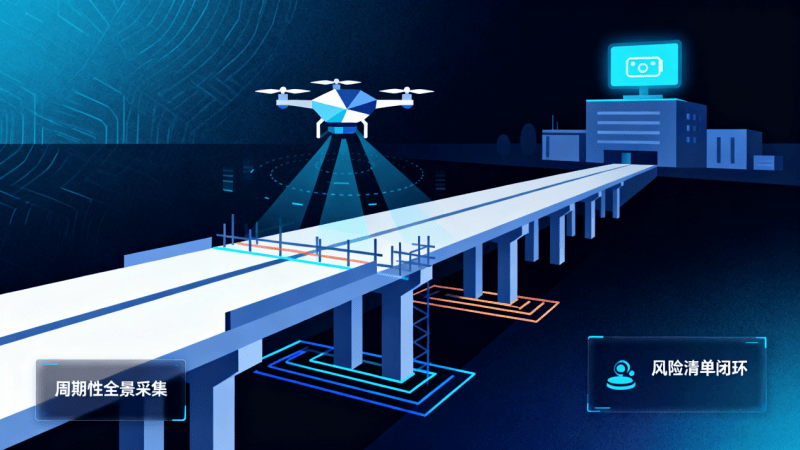
芯璟低空在桥梁施工场景里提供的,不是“飞一趟拍视频”,而是用一套可重复运行的巡检机制,把监理从“点状抽查”升级为“周期性全景采集 + 风险清单闭环”。这套能力归属于芯璟低空四大调度体系中的巡域调度系统:它为桥梁施工设计了专用任务模板,系统会根据施工阶段自动规划桥面、桥下、桥墩周边的多层航线,无人机按节奏周期性起飞,对临时支撑、脚手架、围挡、材料堆放、施工车辆等关键要素进行全景采集。
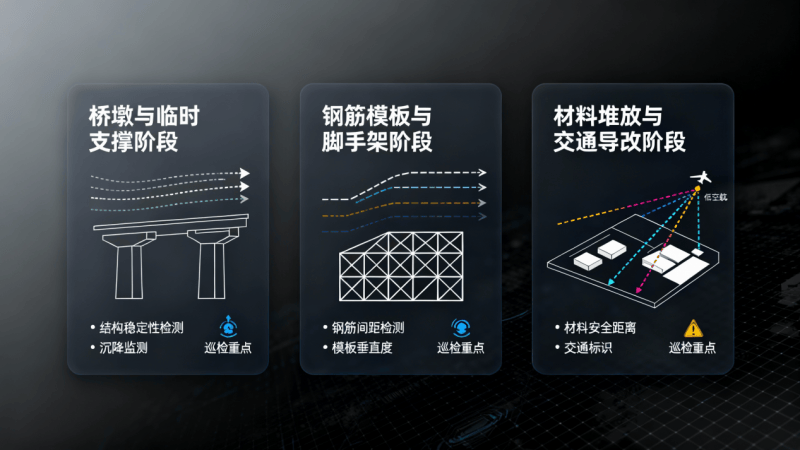
1)按施工阶段“自动换档”:把变化写进计划
桥梁工程最大的特点是“阶段性强”。某些阶段重点在桥墩与临时支撑,某些阶段重点在钢筋模板与脚手架,某些阶段则重点在材料堆放与交通导改。巡域调度系统的做法,是先把工程拆成“阶段模板”,再让系统根据当前阶段自动组合航线与巡检重点,确保每次巡检都围绕当期高风险点来拍,而不是漫无目的地飞一圈。这样,监理拿到的不是碎片化素材,而是一套“同口径、可对比”的过程记录。
2)AI结构化识别:从“看视频”变成“看问题清单”
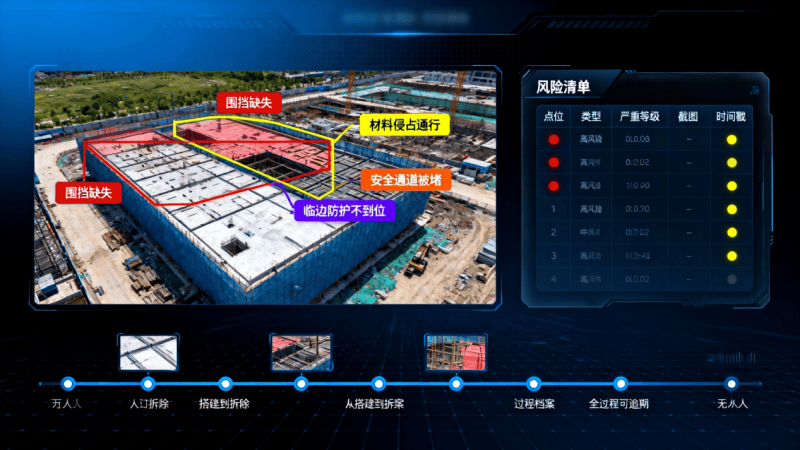
拍得到不等于管得住。桥梁现场画面信息量巨大,监理人员不可能逐帧翻看。芯璟低空把AI识别嵌入巡检链路:对影像进行结构化分析,识别“围挡缺失”“材料侵占通行车道”“安全通道被堵”“临边防护不到位”等典型问题,并按严重程度自动分级。
这一步带来的改变很直接:监理不再主要依靠经验“找问题”,而是系统把疑似风险点标出来,并附带截图、时间戳与位置范围,现场复核更快、整改派发更准,闭环推进也更高效。
3)实时回传指挥中心:让监理不被现场限制
桥梁施工往往跨区域、跨班组,管理压力来自“人不可能一直在所有点位”。巡检结果会实时回传工程指挥中心,系统自动生成两类关键成果:
•一份风险清单:问题点位、类型、严重等级,便于快速派发整改;
•一份时序影像档案:把同一部位从搭建到拆除的完整过程放在一条时间轴上,支持远程复核与在线复盘。
这意味着管理者不必依赖“现场口头汇报”,而可以在时间轴上回看过程:某段围挡何时缺失、多久未恢复;某处材料是否反复侵占通道;某个风险点整改后有没有复发——全部有据可查。
4)对质量、安全与验收的现实价值
桥梁项目通常牵涉施工、监理、业主、监管多方。争议最常见的根源,就是“过程证据不足”。巡域调度系统把过程变成可沉淀的证据链:
•对施工方:问题更早暴露,整改更快,减少返工与停工风险;
•对监理方:远程复核有依据,抽查升级为“按风险优先级”的精准巡查;
•对业主与监管:阶段成果与关键节点更透明,验收不再只看结果,也能回看过程。
桥梁施工无人机巡检的本质,是把监理的“眼睛”抬到空中,把“看不全、看不连续、说不清”的难题,变成“可覆盖、可对比、可追溯”的工程能力。芯璟低空希望通过巡域调度系统,让桥梁施工的安全与质量管理不再靠运气与经验,而是靠标准化巡检、结构化识别与时间轴证据链,真正把工程监理做成一套可长期运行的数字化能力。